My little sister is a CS student in college and has suddenly taken an interest in "Neuroprosthetics" and "Controlling robot hand with EMG" and wants to learn skills by building arduino projects. She wonders how to get into research in this field.
Her coursework so far has been what seemed to me a typical undergrad curriculum (data structure & algo, database, web-dev, C/Java, etc), without a particular specialization yet.
I recommended the following minimal "catch-up" self-study curriculum over the summer to get her ready for hands-on BCI/Neuroprosthetics research. Posting because I can't find any satisfactory one on the internet. Traditional BME undergrad education might be the closest one, but we can skip a lot of the background in:
circuits: High school AP Physics is enough, most EMG research scientists at Meta Reality Labs don't use much more than that anyways
bio-electricity: The sensor abstraction (measure small voltage generated by summing of action potential) is enough to start understanding the paper. No need to understand
neurobiology: Needed for brain-computer interface. But for EMG and peripheral interface, unnecessary
computer science/embedded programming: no need for a CS major
The only 3 background areas that need to catch up are then: light signal processing, machine learning, light computation neuroscience.
Self-study coursework
Math
Linear algebra
Calculus
Statistics and probabilities (e.g. expectation, variance, etc)
I assume this for all STEM undergrads.
(Digital) Signal Processing
If you work with any type of sensors, you should understand how the signals are transformed.
Assuming you don't want to do circuit designs, these are the basics for interpreting and cleaning signals.
This is a very deep field, I select the bare minimum for a foundation so you can build from here when reading papers/taking courses.
You only need up to dynamical systems (you'll know more than most EMG people). The goal is to familiarize youself with terms that come up in common jargons to cut through the noise.
If you get more interested in the brain (vs. the peripheral nervous system), then the UW computation neuroscience course will be more useful.
Self-study learning goals
Be able to read through and understand the SOTA EMG paper from Meta
Some tips on reading:
Give it a skim in the main sections or ask AI for a summary
Identify some things you've never heard of or understand (e.g. LSTM, convolutional blocks, RMS power, motor unit action potential, Gaussian filters). Make a list and the area of study they might relate to, this will prime you for more effective learning later.
Do your learnings -- you might start to recognize these concepts
Then come back and read through the different sections.
In the end, you should be able to identify different major components that enabled this work and understand some of the technical details.
This is a complicated paper with a lot of technical depth. Even if you understand the gist of it (don't need to understand the exact math) is good enough for now.
Hands-on project
In parallel or even before being able to understand the paper, you should be able to build the following minimal project:
Have cheap EMG sensors attached to your forearm muscles
Test yourself: why forearm muscles?
Record the signals through the Arduino ports.
Test yourself: which ports and why?
Visualize the signals as you make a fist.
Test yourself: what do you expect to see?
Program a classifier based on the signals to determine your hand state (e.g. fist or not)
Test yourself:
With more knowledge you can start improving it to detect finer and smaller gestures. But you'll eventually hit a wall (why?)
Knowledge distillation has become a cornerstone technique for training capable smaller language models. The recipe seems straightforward: generate high-quality responses from capable teacher models, then train a student model on these examples. Unfortunately, student models learning from knowledge distilled from multiple capable teachers don't necessarily perform well, mixing responses from multiple teacher models often produces worse results than using a single teacher*, even when each individual teacher is highly capable.
This phenomenon, sometimes called the "knowledge conflict", "style inconsistency", or "teacher heterogeneity" issue, has been observed repeatedly and is open knowledge in frontier labs, but remains underexplored in the literature.
The Empirical Observation
Recent work has documented the multi-teacher distillation problem directly. Jin et al. (2026) found that "contrary to expectation that enlarging the teacher LLM ensemble would enhance the capabilities of student models, the distillation performance actually declines as the number of teacher models further increases". This decline persists even when each additional teacher is individually capable.
The PerSyn paper similarly observes that "stronger models are not always optimal teachers for small student models, since their outputs may be overly complex and shift away from the students' distribution". Simply mixing synthetic data from multiple teachers leads to suboptimal performance.
But why? Each teacher produces correct, high-quality responses. Shouldn't more diverse training data help?
The Distributional Perspective
To understand what's happening, we need to think about what the student model is actually learning during supervised fine-tuning (SFT).
Single Teacher: A Coherent Target
When training on data from a single teacher, the student learns to approximate that teacher's output distribution:
The teacher's distribution, while complex, is coherent—it reflects a single model's learned patterns for formatting, hedging, explanation structure, and stylistic choices. The student has a clear target to fit.
Figure 1: With a single teacher, the student learns to approximate a unimodal distribution. The optimization objective is clear.
Multiple Teachers: Superimposed Distributions
When training on data from multiple teachers, the student sees a mixture:
If the teachers have different stylistic patterns—different ways of starting explanations, different hedging phrases, different levels of verbosity—then the training distribution is multimodal. The student must fit multiple overlapping but distinct distributions simultaneously.
Figure 2: With multiple teachers, the training distribution becomes multimodal. Each teacher contributes a distinct mode.
What Does the Student Actually Learn?
SFT with cross-entropy loss on multimodal data tends to produce an interpolated distribution.
When the student model lacks the capacity or signal to separate the modes, it learns something like the average:
This interpolated distribution may not correspond to any coherent generation behavior. It places probability mass in regions between the modes—outputs that neither teacher would produce.
Figure 3: The student learns an interpolated distribution that doesn't match any individual teacher. The resulting outputs may be incoherent—blending styles in ways no real model would.
Concrete Example
Consider how different models explain a mathematical concept:
Teacher A (Concise):
"The derivative of x² is 2x. This follows from the power rule: d/dx[xⁿ] = nxⁿ⁻¹."
Teacher B (Verbose):
"Let me walk you through finding the derivative of x². We'll use the power rule, which states that for any function f(x) = xⁿ, the derivative is f'(x) = nxⁿ⁻¹. Applying this with n=2, we get d/dx[x²] = 2x²⁻¹ = 2x. This is our final answer."
A student trained on both might produce:
Student (Interpolated):
"Let me explain. The derivative of x² is 2x. We use the power rule."
This response is neither the clean conciseness of Teacher A nor the thorough walkthrough of Teacher B. It's an awkward middle ground that represents neither distribution well.
What to do instead?
While many different distillation methods have been presented in the literature for multi-teacher knowledge distillation, many involving clever weighting and estimation of teacher models and their "expertise", the leading open-source model developers—DeepSeek, Qwen, Kimi, and others—have converged on a pattern that sidesteps this problem: specialist models derived from the same base model.
The Specialist Distillation Pattern
The general recipe, as observed in multiple model releases:
Train base model on large-scale pretraining data
Create specialists by fine-tuning the base on domain-specific data (math, coding, reasoning, etc.)
Generate training data from specialists on prompts in their respective domains
Train general model by distilling from all specialists back to the base
Crucially, all specialists share the same base model. This means they share:
The same vocabulary and tokenization
Similar underlying representations
Consistent formatting tendencies inherited from base training
Related but not identical output distributions
Figure 4: Specialists from the same base model have distributions that are shifted versions of each other, not entirely different distributions. The interpolation problem is greatly reduced.
Why Same-Family Specialists Work
When specialists derive from the same base:
Distributional similarity: Their output distributions are perturbations of a shared prior, not arbitrary distributions
Style inheritance: Domain-specific fine-tuning changes what the model knows more than how it expresses things
Bounded divergence: The amount of post-training data for specialization is small relative to pretraining, limiting distributional drift
This also gives insight to the scale of data that is needed to overcome the knowledge conflict problem when distilling from multiple teachers, which is likely bigger than that of typical SFT data size.
The student learning from same-family specialists isn't trying to fit arbitrarily different distributions—it's fitting distributions that are already close in the space of possible outputs.
The Motivation: Why Not Just Mix All the Data?
A natural question arises: why go through the trouble of training separate specialists and then distilling? Why not simply combine all the domain-specific training data and train a single model on the mixture from the start?
The two-stage specialist approach offers several advantages:
Avoiding catastrophic forgetting during training: When training a single model on mixed data, aggressive optimization on one domain can degrade performance on others. Specialists can be pushed harder on their specific domain without this concern.
Flexible data ratios at distillation time: With specialists, you control the mixture ratio when generating synthetic data, not when training. This is a much easier hyperparameter to tune—you can regenerate data at different ratios without retraining models.
Domain-specific training techniques: Different domains may benefit from different training approaches (curricula, loss functions, data augmentation). Specialists allow domain-specific optimization that would conflict if applied simultaneously.
Independent quality control: Each specialist can be evaluated and iterated on independently. If your math specialist underperforms, you fix it without touching the code specialist.
Selective distillation: The distillation process can cherry-pick the best outputs from each specialist via rejection sampling. Direct data mixing doesn't offer this quality filtering opportunity.
Compute efficiency for iteration: Updating one capability requires retraining only that specialist and regenerating its contribution to the distillation data, not retraining the entire model.
Organizational simplicity: Each specailist model can have a separate team associated with it in the organization, simplifying human communication overhead.
The key insight is that the distributional consistency comes from the shared base model, not from training on mixed data. Specialists diverge in what they know, but retain similar patterns for how they express it—making their outputs compatible for distillation even though they were trained separately.
Evidence from Practice: The DeepSeek-R1 Example
The DeepSeek-R1 paper provides a particularly clear example of this pattern applied to reasoning. Their pipeline:
DeepSeek-R1-Zero: Apply large-scale RL directly to the base model (DeepSeek-V3-Base) without SFT. This produces a specialist reasoning model with emergent chain-of-thought behaviors—but also issues like poor readability and language mixing.
Rejection sampling: Generate reasoning solutions from R1-Zero, filter for correctness.
Combined SFT: Train the final R1 model on a mixture of:
Reasoning data from R1-Zero (the reasoning specialist)
Non-reasoning data from DeepSeek-V3's existing SFT data (writing, factual QA, etc.)
Critically, both the reasoning specialist (R1-Zero) and the non-reasoning data source (V3) derive from the same base model. The paper explicitly notes that "we create new SFT data through rejection sampling on the RL checkpoint, combined with supervised data from DeepSeek-V3 in domains such as writing, factual QA, and self-cognition."
the reasoning patterns come from one specialist (R1-Zero),
general capabilities from another (V3's post-training)
Both share the V3-Base foundation. The result maintains coherent outputs while gaining specialized reasoning abilities.
Qwen follows a similar iterative improvement loop with domain specialists
The general model benefits from domain transfer while maintaining coherent outputs because all teachers are consistent stylistically.
Connection to Reasoning Mode Training
The rise of "thinking" models—those with explicit reasoning traces enclosed in <think> tags—introduces a new dimension to this problem.
Reasoning as a Separate Distribution
Models like DeepSeek-R1, o1, and Claude's extended thinking learn two distinct output modes:
Direct mode: Standard assistant responses (System 1)
Thinking mode: Extended reasoning traces followed by answers (System 2)
These modes have different distributional characteristics. Thinking mode features:
Longer outputs with self-correction
Exploratory hypothesizing
Step-by-step decomposition
Different transitional, introspective phrases ("Let me reconsider...", "Wait, that's not right...")
Is This Multi-Teacher Distillation?
One might ask: if we train a model to have both thinking and non-thinking modes, aren't we effectively training on two different distributions?
Yes, but with a crucial difference: the mode is explicitly marked.
<no_think_token> → Distribution A (direct responses)
<think_token> → Distribution B (reasoning traces)
The <think> token acts as an explicit conditioning signal. The model doesn't need to infer which distribution applies—it's directly specified. This converts the problem from:
Implicit mixture (bad): Learn to somehow fit both distributions without knowing which is which
Conditional distributions (tractable): Learn and separately
Figure 5: With explicit mode tokens, the model learns conditional distributions rather than a confused mixture. The token boundary provides clear separation.
The Bimodality Hypothesis
This suggests a hypothesis: explicit mode separation via special tokens can allow different "teachers" for different modes.
Specifically:
Thinking mode could use reasoning traces from a strong reasoning model
Direct mode could use responses from a stylistically preferred model
The mode tokens prevent cross-contamination
The student learns:
Inside <think>: Reasoning patterns from the reasoning model
After </think>: Answer style from the preferred model
This is a form of multi-teacher distillation, but the explicit structure potentially makes it tractable. However, this doesn't mean naive application will work in practice. Suppose the model successfully learns to output reasoning process in thie <think></think> block and direct answer outside. The distribution differences between these two modes can be so drastic such that the direct answer doesn't follow from the reasoning tokens. This is not unreasonable -- there's nothing forcing the reasoning logic to "transfer" to the direct answer. Therefore reasoning models trained this way may result in having correct "thoughts" leading to an incorrect answer.
Implications and Open Questions
For Practitioners
Prefer single teachers when possible. The simplicity pays off in coherent outputs.
If mixing teachers, measure style divergence first. For example, train a classifier to predict which teacher generated a response. High accuracy = high divergence = likely problems. Distilling from the "best math model" and the "best creative writing model" may not lead to the "best math + writing" model.
Same-family specialists are safer than arbitrary model combinations. If you must use multiple teachers, prefer those from the same base model.
Explicit mode separation helps. If you need different capabilities (reasoning vs. direct), consider explicit mode tokens rather than implicit mixing. There are methods that can improve non-explicit mixed-mode performance though.
Open Research Questions
How much style divergence is too much? Is there a threshold below which multi-teacher mixing is safe?
Can rewriting normalize styles effectively? Having one model rewrite another's outputs might help, but at what cost to content fidelity?
Do larger students handle multimodality better? Perhaps sufficient model capacity can maintain separate modes implicitly.
What's the role of data scale? With enough data, does the distributional mismatch problem diminish?
Conclusion
The empirical observation that multi-teacher distillation often underperforms has a natural explanation: training on multimodal data from heterogeneous teachers leads to interpolated distributions that don't correspond to coherent generation behavior. The student learns to produce outputs that fall between the modes—satisfying neither teacher's distribution well.
The research community has responded with practical solutions: using specialists from the same model family, which constrains distributional divergence, and employing explicit mode tokens, which convert implicit mixtures into tractable conditional distributions.
As models become more capable and distillation pipelines more complex, understanding these distributional dynamics becomes increasingly important. Style consistency isn't just an aesthetic preference—it's a fundamental property that determines whether a student can learn coherently from its teachers.
DeepSeekMath-v2 came out on Thanksgiving without much fanfare but has now become the only open weight model to achieve IMO-gold performance with natural language informal proofs, after Gemini and GPT5. The technical reported is a packed with technical details, much of which isn't entirely surprising as the entire LLM field has converged toward a similar direction in terms of how to achieve iterative improvements in a domain like informal math proofs.
Key ideas
How to verify?
In the past year, RL with verifiable reward (RLVR) has made a lot of stride, especially in math and coding domains. After GPT-4o, Deepseek-R1 paper really popularized this approach (history repeating itself with DeepseekMath-v2 now). However, for something not easily verifiable like math proofs, how to craft a reward function that provides a training signal?
In other words, how to verify math proofs better to provide a training signal to improve proof generation?
Taking inspiration from human proof verification, we notice that:
Issues can be identified in a proof even without reference solution. Whether this is by pattern matching a familiar subproblem and noticing a wrong solution, or by noticing inconsistent logical statement even if one cannot verify how the predicates and conclusion of a logical statement were derived.
A proof is more likely to be valid when no issues can be identified after "thinking for a long time by a lot of different people". This is similar to the scientific peer review process. In LLM speak, this means that a proof is more valid if "after scaled verification efforts no issues can be identified".
So the answer to "how to verify better" is then "scaling verification compute".
What's "scaling verification compute"?
This is in line with scaling test time compute. In the case of DeepseekMath-V2, this is parallel inference with majority-voting, which does the following:
Given a proof, how do we verify its correctness better?
Give the proof to the verifier model, ask it to evaluate the proof according to some rules.
Do this in parallel for times.
If most of the generated verifications think there's no problem, then proof is probably good.
If at least of the generated verifications think that there's some kind of problem, then proof probably has a problem.
If no group of verifications agree on a correctness score, then the verifier is too unsure of the proof quality -- this means the verifier is not smart enough to check the work of that proof. We can discard this specific proof rollout.
How to improve proof-generation ability?
The verifier with scaled compute can now provide a reward signal to improve proof generation in an RL setting. This reduces to the classic RLVR-by-GRPO:
For each problem , generate proofs from the model.
For each proof , do scaled verification (so times per proof), and get the resulting proof's score from majority voting -- this results in a set of {, } for each problem.
Combine each with other rubrics to get a final reward score for .
Do backprop with the reward score.
The reward score for proof-generation is set to be .
At the end of a round of RL, we can additionally do SFT for each problem with proofs verified to be correct. This will distill and improve the model's proof generation capability further.
Maintaining generation-verification gap
An assumption that is implied in the above approach is that verification is easier than generation, this is known as the "generation-verification gap". This has the same intuition as P != NP -- the widely believed but unproven statement that problems whose solutions are easy to verify (P) are not necessarily easy to solve (NP).
Scaling verification compute to verify generated proofs by the LLM can work IF there exists a gap between the proof generator and the proof verifier. But as RL improves the generator, this gap shrinks and performance eventually saturates, and the rate of this saturation has been shown to correlate to the models' pretraining flops.
Therefore to continuously improve generator abilities, the verifier capability needs to improve as well -- in other words, the generation-verification gap needs to be maintained.
This means the verifier needs to be continously trained somehow, with dataset of {proof, proof score}. This was provided exactly during the proof-generation rollout process!
With this data, RLVR-by-GRPO for verification generation can proceed similarly. The obvious reward term is:
where is the score given to the proof by the i-th verification rollout, and is the "ground-truth" proof score from the proof generation step. We want each verification rollout to match the consensus score for a proof.
Additionally, there's format reward to reward certain verification format.
Prevent verifier hallucination with meta-verification
With only and , the verifier can assign a correct score to the proof while still hallucinating non-existent issues. To prevent this, verification of proof verification reasoning can be introduced -- metaverification.
The underlying idea here is again the generation-verification gap -- it's easier to verify the verifications than generating the verifications. Here, for each verification, a metaverification is generated to find issues in the verification analysis with an accompanying verification quality score . This score is then added to the verifier training reward term:
In the end, the verifier can both verify proofs, and verify those verifications.
Meta-verification as an additional scaling axis?
All problems in computer science can be solved by another level of indirection [...] except for the problem of too many levels of indirection
The above is a a piece of engineering common wisdom that's also used often as a meme/joke. It's often applied in situations where the solution is to apply an extra layer of abstraction (e.g. virtual memory, file descriptors, DNS, abstract classes/interfaces, containers, etc). The use of meta-verification reminded me of this.
Metaverification here takes the advantage of the verification-generation gap. It's unclear how fast the metaverification-verification gap reduces compared to the verification-generator gap, and how that relative convergence varies for problem domains. Perhaps multiple layers of metaverifications can become a trick to prevent verifier performance saturation?
Alternatively, we can think of meta-verification as introducing additional layer of model "feedback-loop" to amplify its abilities.
Forcing self-verification during proof generation
The authors points out that
when a proof generator fails to produce a completely correct proof in one shot [...] iterative verification and refinement can improve results. This involves analyzing the proof with an external verifier and prompting the generator to address identified issues.
But in practice:
while the generator can refine proofs based on external feedback, it fails to evaluate its own work with the same rigor as the dedicated verifier
What this means:
Scenario: The model generates a flawed proof.
Standard Behavior: The model concludes "Therefore, the answer is X" and internally assigns it a high confidence.
The Consequence: Because the model thinks it is right, it stops. It never triggers a refinement loop because it doesn't believe there is anything to fix.
While the model could fix the error if an external teacher pointed it out, it fails to find the error itself.
The authors then refined the proof-generation prompt and updated the reward function to force the model to rigorously "identify and resolve as many issues as possible before finalizing the response" (i.e. a type of test-time compute scaling by increasing reasoning chain length).
This is done by:
In addition to the proof generated, the prompt also asks the model to generate a self-analysis of the proof according to the same rubric given to the verifier.
The proof receives score , and the self-analysis receives metaverification score .
The reward function then becomes:
So the verifier will check the proof generated, and the associated self-analysis. This then incentives the model to think harder and not be lazy.
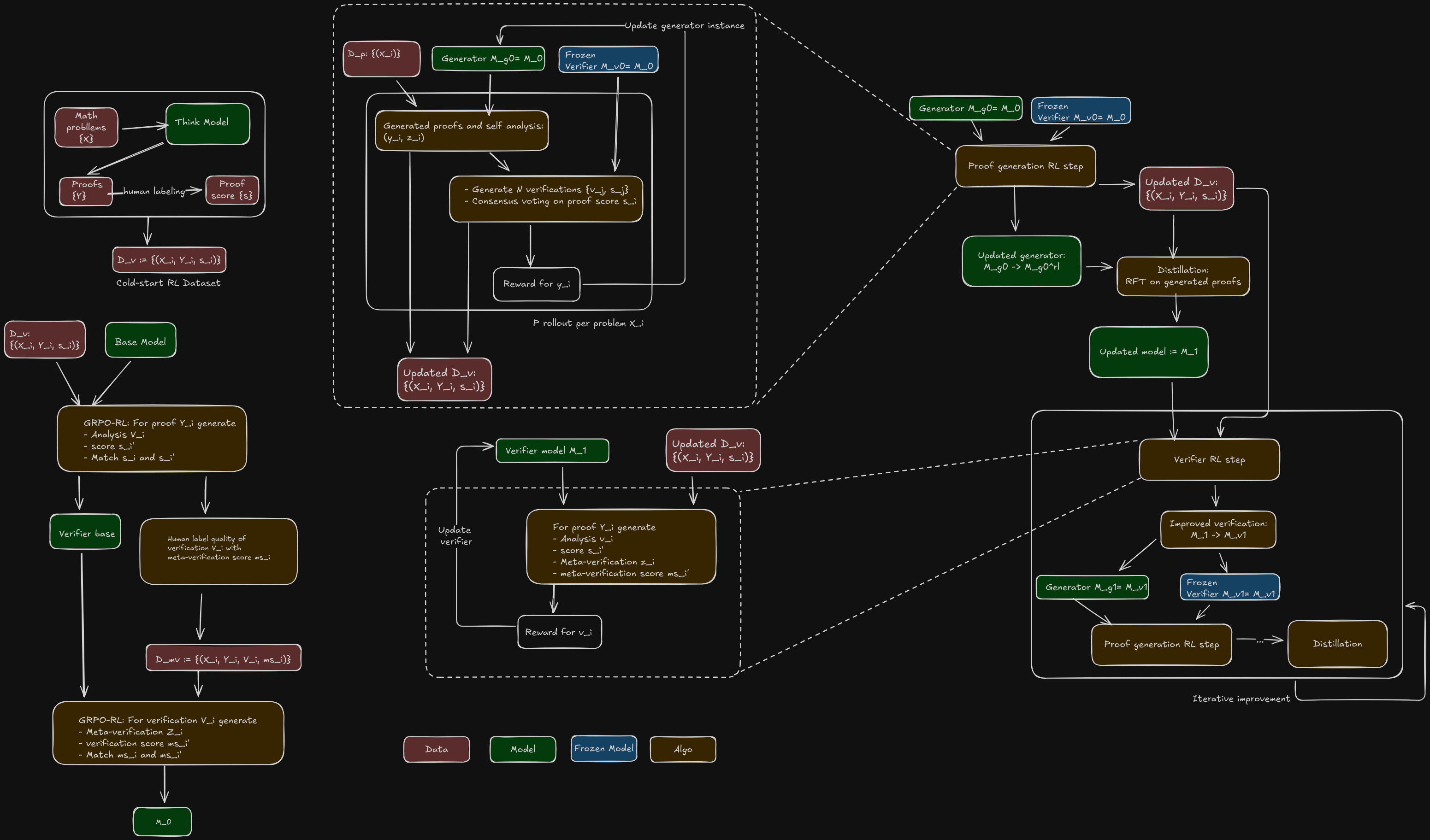
Iterative improvement
Now all pieces are in place to do continuous iterative improvement. Note that even though we talk about "verifier" and "generator", they are in fact the checkpoints of the same model. Let be the model at the start of the process.
In iteration 0, we have the following steps:
Initalize proof verifier from and freeze it.
Initialize proof generator from . Use it for proof-generation RLVR with rollouts:
for each problem, generate proofs.
for each proof and associated self-analysis , generate verifications
Conduct consensus voting among the verifications to either assign a score to each proof for reward calculation (and associated metaverification score for ), or discard that proof if no consensus.
backpropagate all the reward signals on the generated proofs and self-analyses.
At end of each iteration, we also save -- triplets of problem, proof, and proof score for verifier training.
After this process, updated to .
Do distillation via SFT on with correct proof rollouts, i.e. subset of where , this gives us .
In iteration 1 and on, we have:
Do verification-generation rollout with rollouts on .
for each proof, generate verifications and metaverifications
for each verification , metaverification , and associated proof score , calculate reward score .
At end of this process, is updated to .
[Not explicitly stated in the paper]: The metaverification ability can also be improved via RL here. For each from the previous round, generate metaverifications and perform consensus voting to obtain "ground-truth" metascore . The RL process reward metaverification rollout metascore to match .
Freeze .
Initialize proof generator from . Do proof-generation RLVR with rollouts. After this step, becomes .
Do SFT on with correct proof rollouts, resulting in .
Important details
Model initialization and cold-start
Before the iterative improvement can begin, SFT is needd to improve the baseline generation and verification performance -- otherwise a lot of inference compute would be wasted to derive easy facts. Fortunately the base model DeepSeek-V3.2-Exp-Base already has reasonable math capabilities.
Cold-start verifier RL dataset
To start verifier RL training, a set of hard problems, proofs and estimates of proof quality is needed.
Curate by crawling hard math problems (e.g. IMO, USAMO, CMO, etc) that require proofs.
Generate candidate proofs using Deepseek-V3.2-Exp-Thinking -- a capable thinking model. The prompt used iterative-refinement to ask the model to improve its proofs to improve the proof quality.
Sample from this pool of generated proofs and have humans annotate the proof quality.
This process yields the initial RL-dataset -- triplets of problem, proof, and annotated proof score.
Cold-start metaverifier RL dataset
Similarly, annotations are needed to initiate RL training for the metaverifier.
The verifier generates proof verification ( is part of this) for proof .
Human experts annotate according to some rubric to arrive at a verification score, .
The resulting dataset is used to train the metaverifier (same as the verifier) to produce a summary of issues found in each verification and produce a verification score to match .
Inference: Sequential refinement with verification
Iterative self-refinement is a test-time inference scaling idea introduced around 2023 (self-refine, ReAct). This technique is similar to how humans try to iteratively refine a solution:
Model generates an answer
Prompts the model verifies and spots mistakes in the answer and proposes solution
Prompt the model to generate an answer again, taking into account of its own analysis in (2).
Iterate 2-3 multiple times
Notice with this method, while the quality of the proof improves with additional iterations, its ultimately limited by the verifier's ability!
The process of iterative self-refinement can additionally be parallelized (i.e. having multiple people thinking about the same problem repeatedly). The final answer can then be determined by committee among the different threads' answers (i.e. via majority voting, another synthesizer model decided based on their results, etc)
High-Compute Search (Population-Based Refinement)
For the most challenging problems where standard sequential refinement fails, the paper proposes a "High-Compute Search" that scales both generation (breadth) and verification (depth). Instead of refining a single thread, this method evolves a population of proofs.
Initialization: A pool of candidate proofs is initialized (e.g., 64 samples).
Mass Verification: For each proof in the pool, the model generates 64 independent verification analyses. This statistical volume helps identify subtle issues that a single verification pass might miss.
Selection & Pairing: The system selects the 64 highest-scoring proofs based on their average verification scores. Each selected proof is paired with 8 verification analyses, specifically prioritizing those that identified issues (scores of 0 or 0.5).
Evolution: Each <proof, analysis> pair is used to generate a new, refined proof, which updates the candidate pool.
Termination: The process repeats for up to 16 iterations or until a proof passes all 64 verification attempts (unanimous consensus), indicating extremely high confidence in correctness.
This method is used to eventually take IMO 2025 and Putnam 2024 achieving incredible scores.
Step 3 seems rather strange -- pairing high-scoring proofs with randomly sampled verification you are bound to end up with <proof, analysis> pairs where the analysis is simply irrelevant to the proof. I wonder how often this actually generates a better proof than the existing pool, in other words, how compute efficient this is.
Why this works and what next?
The success of AlphaGo and AlphaZero were major inspirations for a lot of the iterative improvement approaches. But the approaches there are hard to translate into iterative improvement in LLMs, as previously explained in DeepSeek-R1:
we explored using Monte Carlo Tree Search (MCTS) to enhance test-time compute scalability. This approach involves breaking answers into smaller parts to allow the model to explore the solution space systematically. To facilitate this, we prompt the model to generate multiple tags that correspond to specific reasoning steps necessary for the search. For training, we first use collected prompts to find answers via MCTS guided by a pre-trained value model. Subsequently, we use the resulting question-answer pairs to train both the actor model and the value model, iteratively refining the process.
However, this approach encounters several challenges when scaling up the training. First,unlike chess, where the search space is relatively well-defined, token generation presents an exponentially larger search space [...] Second, the value model directly influences the quality of generation since it guides each step of the search process. Training a fine-grained value model is inherently difficult, which makes it challenging for the model to iteratively improve.
In conclusion, while MCTS can improve performance during inference when paired with a pre-trained value model, iteratively boosting model performance through self-search remains a significant challenge.
The MCTS in AlphaGo/Zero was hard to replicate because:
The LLM token space is hard to define as a search problem useful for MCTS.
The value function used to guide the search is hard to define.
GRPO-style RL solves (1) by replacing tree search with parallel sampling (exploration), and applying the same to verification solves (2) by using verifiers as the reward model. Now, iterative improvement is possible.
The core mechanism in both systems is using compute-heavy search to generate high-quality data, then distilling that data back into the model to improve its "instinctive" capabilities.
Component
AlphaGo / AlphaZero
DeepSeekMath-V2
1. Search Guide (The "Intuition")
Policy & Value Networks Neural networks that predict the best next move () and the winning probability () to prune the search.
Verifier Model A model trained to estimate the correctness of a proof () and the validity of reasoning steps.
2. Search Mechanism (The "Thinking")
Monte Carlo Tree Search (MCTS) Simulates thousands of future game trajectories to refine the probability of which move is truly best.
Parallel Sampling & Refinement Generates multiple candidate proofs (Best-of-N) and performs iterative self-correction to find a valid solution.
3. Policy Improvement (Improving Generation)
Distillation of Search Probabilities The Policy Network is trained to match the move counts from MCTS (learning to instantly predict moves that took MCTS a long time to find).
Rejection Fine-Tuning (RFT) The Generator is trained (SFT) on the successful proof rollouts found via high-compute search/refinement (learning to instantly generate proofs that required iterative fixing).
4. Value Improvement (Improving Evaluation)
Training on Game Outcomes The Value Network is retrained to predict the actual winner () of self-play games, grounding its estimates in reality.
Training on Consensus Verification The Verifier is retrained to predict the consensus score derived from majority voting (grounding its estimates in statistical consistency).
It's obvious that iterative improvement for a verifiable domain like Go should work. The intuition behind why it should work for a hard-to-verify domain like math proofs is less so, and I understand it as the following:
Consensus Voting as Noise Reduction Individual model outputs are noisy samples from a probability distribution. By sampling verifications and taking a majority vote (especially when cross-checked by a Meta-Verifier), we effectively reduce the variance.
- The "Consensus Label" is a far higher-fidelity approximation of the "Ground Truth" than any single model inference.
- Training on this consensus effectively "denoises" the model's understanding of what constitutes a valid proof.
- Known in the field as "self-consistency"
Manifold Expansion via Search and Distillation We can view the "space of correct mathematical proofs" as a low-dimensional manifold within the high-dimensional space of all possible text.
RL/Search (The Reach): Standard generation samples near the center of the model's current manifold. Iterative Refinement (Test-Time compute scaling or multiple rounds of RL) allows the model to traverse off its comfortable manifold, stepping through error-correction to find a distant solution point (a hard proof) that it could not generate zero-shot.
Distillation (The Pull): By performing SFT/RFT on these distant solution points, we pull the model's base distribution (manifold) towards these new regions
The Result: The "center" of the manifold shifts. Problems that previously required expensive search (edges of the manifold) are now near the center (zero-shot solvable).
The Difficulty Ceiling As the model improves, the manifold covers the entire training distribution. The limiting factor becomes the difficulty of the problems. If the model can solve everything in the dataset zero-shot, the gradient for improvement vanishes. To exceed the best human capability, the system eventually needs a mechanism to generate novel, harder problems (synthetic data generation) or prove open conjectures where the ground truth is unknown, relying entirely on its self-verification rigor to guide the search into uncharted mathematical territory -- this is likely needed for "superintelligence".
This intuition is well-observed in human learning: we improve the fastest when we are attempting tasks that are SLIGHTLY out-of-reach. In fact, the "search" and "verifier" in LLM iterative improvement are analogous to "information" in the Challenge Point Framework for optimal learning difficulty.
One of the most well-known understanding in the field of LLM currently is that “pretraining is where the model learns knowledge”, SFT and RL then elicit/shapren this knowledge to make them useful. I'm not entirely sure what first popularized this (could just be due to academic diffusion), but the first well-known paper of might've been the LIMA paper (May 2023), which suggests that:
Taken together, these results strongly suggest that almost all knowledge in large language models is learned during pretraining, and only limited instruction tuning data is necessary to teach models to produce high quality output.
This introduced the notion that a model’s capability is upper bound by the quality of the pretraining data, and that the better the pretraining is, the more benefits SFT will be. A corollary of this is that focusing on SFT too much can degrade general model capabilities in other tasks (e.g. reasoning and math).
We re-examine these claims by empirically studying the scaling behavior of post-training with increasing finetuning examples [...] Through experiments with the Llama-3, Mistral, and Llama-2 model families of multiple sizes, we observe that, similar to the pre-training scaling laws, post-training task performance scales as a power law against the number of finetuning examples. This power law relationship holds across a broad array of capabilities, including mathematical reasoning, coding, instruction following, and multihop-reasoning. In addition, for tasks like math and multihop reasoning, we observe that a handful of examples merely align the model stylistically but do not saturate performance on the benchmarks. Model performance is instead correlated with its reasoning ability and it improves significantly with more examples. We also observe that language models are not necessarily limited to using knowledge learned during pre-training. With appropriate post-training, a model’s ability to integrate new knowledge greatly improves on downstream tasks like multihop question-answering.
This paper then provides evidence against the “knowledge base is formed only in pretraining” understanding. Traditionally (e.g. 2022), LLM training consists of pretraining, midtraining (on data of specialized domain e.g. STEM), instruction-tuning/SFT, and RL. Subsequently it’s becoming clear that focusing on SFT alone can provide has outsized returns:
Models benefit from learning from QA data, if it’s high quality and have diverse prompt format
The resulting model also learns how to act as an assistant (style alignment)
This style of training allows the introduction of additional tricks such as Rephrasing. First widely introduced in Llama3 and now used in more models like Kimi, to create more synthetic training data from existing data. This technique rephrases text in different ways, and creates question-answer pairs from this text in different styles. This can be thought of as a form of data augmentation, encouraging model generalization.
What about Style-locking?
In vanilla instruction-tuning, the model is shown the prompt, and generates the response tokens with the objective of matching the response token distribution with that of the reference response, while MASKING the loss of the prompt tokens. In other words, in instruction-tuning, the response generation is always conditioned on the prompt. A potential concern might be that this can degrade the model’s generative ability and learn to only output in question-answer format, such that if prompted something non-standard like “1, 2, 3, 4,...” it would shit the bed.
Adaptations like training only on poetry, or only on responses without corresponding instructions, yield models that follow instructions. We call this implicit instruction tuning.
Language models are, in some sense, just really prone to following general instructions, even when our adaptation strategies don’t teach the behavior directly. We call this implicit instruction tuning.
In other words, training only on RESPONSES of QA-pairs would elicit proper instruction-following, which removes this concern of rigid style and degraded generative ability. This phenomenon is very interesting, as it’s not an obvious result. One potential hypothesis is that being able to predict the responses means the model would have to understand the context around them (i.e. “I’m likely reading a response to a question”).
So now, SFT can be simplified to: train on diverse and high-quality RESPONSES to QA pairs. Note here “quality” is essentially “long chain-of-thought” style text.
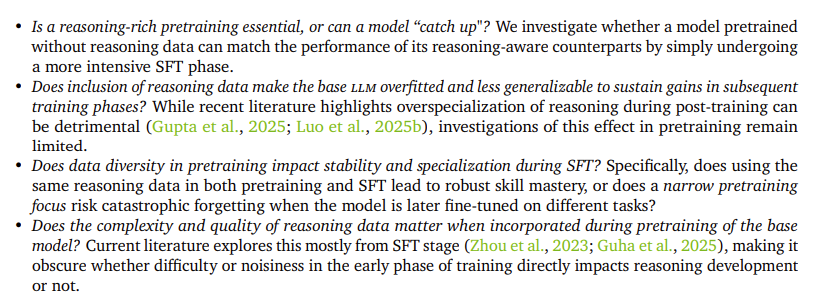
It’s great to see the field simplifying and focusing on what matters the most. A recent paper from Nvidia (Sep, 2025) investigates the interaction of data and phase of training, specifically,
Is adding reasoning data earlier during pre-training any better than introducing it during post-training, when the token counts are controlled? Could earlier inclusion risk overfitting and harm generalization, or instead establish durable foundations that later fine-tuning cannot recover?
This paper investigates the following specific hypothesis:
with conclusions
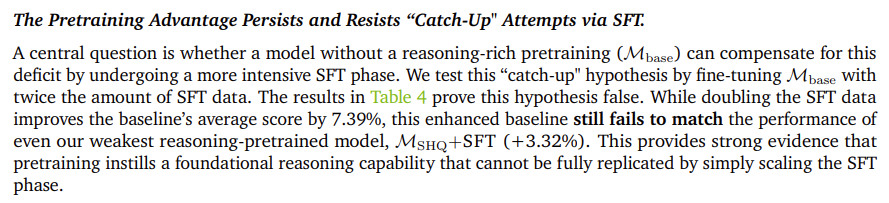
and most importantly refute the SFT-reasoning catchup hypothesis at the end:
This is unfortunate, as pretraining is often the most costly part of LLM training.
Note that the Nvidia paper still concludes that
SFT is a phase of targeted refinement, not broad data absorption
this is in direct conflict with the “Revisiting the superficial alignment hypothesis” paper, which concludes from new-fact learning experiments that:
if the model is first post-trained to do reasoning, it gets better at absorbing new information and using it in multihop reasoning tasks.
In terms of experiment setup, the Nvidia paper’s conclusion about SFT being targeted refinement seems weaker, as its conclusion derives from the observation that naively doubling SFT dataset with mixed quality data does not improve model performance compared to adding small amount of high quality data.
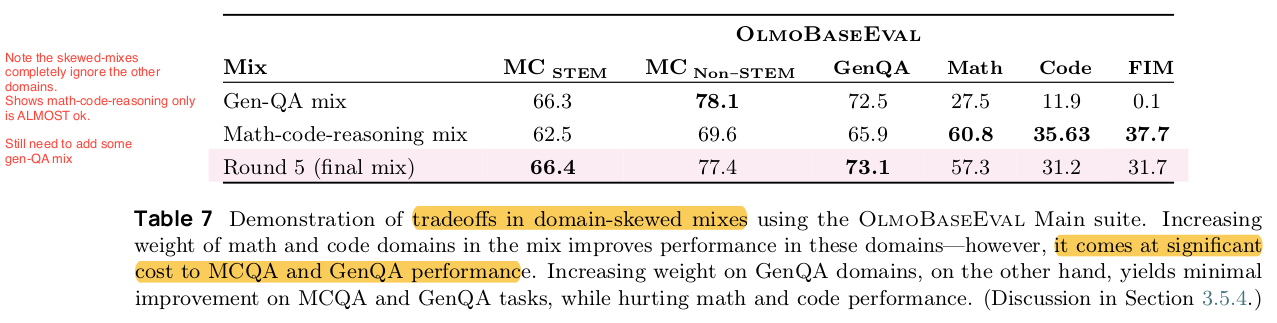
In a similar vein, the recently released OLMO3 showed a cool ablation study comparing the effects of including reasoning/stem data vs not into midtraining stage (total 100B tokens) and showed asymmetrical benefits of different data types to downstream model capabilities.
In conclusion, the basic intuition is the same:
Pretraining data needs to be diverse and have a high scale. Having reasoning data is useful and raises the upper bound.
SFT data needs to focus on high quality, and indeed, quality > quantity here.
The details are simplifying:
Training on simply the responses of high quality SFT/Instruction-tuning data is enough to both elicit proper instruction tuning, model capability, and instill reasoning abilities, without degrading other general abilities significantly (e.g. creative-writing).
But perhaps even having a distinction between pretraining, mid-training, and SFT-post-training is an unecessary division. The only meaningful difference is just the learning rate. Perhaps eventually, the boundaries here will be blurred even more and dynamic learning-rate tuning will become the norm.
What underlying principle hypothesis can be used to explain these observations? Perhaps a good title for a review paper could be "The unreasonable effectivness of reasoning data".
Models learn semantics, language distribution, and a naive world model from pretraining. Here scale and diversity is important because we want to sample the language distribution as widely as possible.
Big problems with language models are hallucination and reliable long horizon reasoning – these abilities have lower entropy and requires higher generalization
To combat this problem, we need lots of high quality (e.g. long COT, multi-hop, coherent reasoning) data.
Yet the process is robust enough such that improvement in reasoning abilities doesn’t necessarily compromise higher entropy tasks performance significantly.
I suspect that language structure likely contributes to the unreasonable effectiveness of reasoning data!
But another explanation could simply be...almost all useful tasks and evals for LLM depend on having robust reasoning and applying them to construction and deductions from assumptions and given info, so it only makes sense that having more high-quality reasoning data in all stages of training benefits model performance 🤷♂️
GRPO-style RL-post training is great, as Deepseek-R1 first showed. But there are some big obstacles, mainly due to data efficiency:
As the model gets smarter, we need more and more difficult problems – this now requires expert human labeling. How to do this with synthetic data?
Plain RL with GRPO has sparse reward – a long-horizon trajectory ends up with a single outcome (and maybe rubric-based) reward applied to all of the tokens generated. This is very data-inefficient.
This can be solved with process-reward based supervision – i.e. give partial credit to different steps in a generated trajectory.
This approach has lost some steam for a bit since Deepseek-R1 paper came out and indicated that they couldn't get this to work reliably.
But it's becoming obvious that this can be done by using LLM-as-a-judge to avoid generating hand-crafted reference solutions.
But the first problem, the need to for ever more difficult prompts for the model to think about, is still a big obstacle with expensive current solution (pay SMEs to handwrite problems and solutions) and we can eventually hit some type of wall to obtain better training data/prompt!
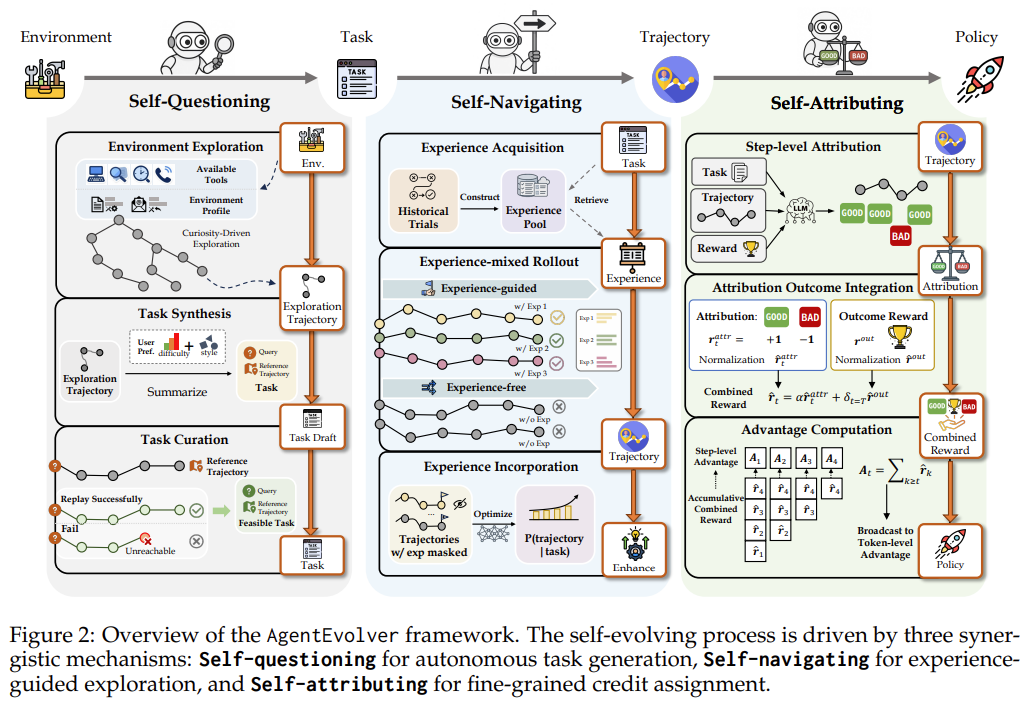
AgentEvolver introduces a framework of self-questioning, self-navigating, and self-attribution within a verifiable environment/simulator as a comprehensive synthetic pipeline to perform RL.
The rough setup:
Given an unknown environment, defined with “attributes” and “actions”, the agent first explores different combinations of actions that can be performed on different attributes, and observes the outputs (e.g. “opening a file named x”, “pressing button y on window z”)
This self-exploration phase helps compile a dataset of what’s “possible” in this environment, and maps out the “boundary” of this state-action space.
The exploration is stochastic and reveals low-likelihood scenarios which might be difficult for a human labeler or LLM to enumerate.
In the self-questioning phase, based on the trajectories compiled during exploration, the LLM can use this to infer potential “tasks’ that might result in such desired trajectories. This is synthetic task generation. Additionally, the trajectories from which the synthetic tasks are derived from thus yield reference trajectories, useful for process reward supervision later.
Of course, different filtering based on user preferences keeps only tasks of certain difficulty and relevance.
In the self-navigating phase, the agent conducts rollouts to solve these synthetic tasks, resulting in multiple trajectories per task.
In self-attribution phase, process reward supervision via LLM judge (can be the model itself!) is performed on each trajectory rollout.
For each step, i.e. a (context, action) pair, the LLM judge decides whether it contributed to the success or failure of the final outcome.
In process-reward calculation, normalization is done first across each trajectory, before calculating the per-step mean/standard deviation for advantage calculation used for GRPO.
The final reward calculation combines both process-reward and outcome reward for each step (and the tokens within each step).
The policy is updated similar to GRPO-RL updates.
This setup is one more step toward the AlphaGo style self-play method. The self-question phase conducts search to generate synthetic tasks, which then leads to RL training that effectively teaches the policy model how to search and reason during inference. This setup is also similar to how Ramanujan discovered a bunch of mathematical results based purely on a fixed set of axioms and theorems. We can imagine having a mathematical environment (e.g. Lean) where the agent learns how to solve novel problems by finding application of specific math operations discovered during self-exploration (I think this is what axiom might be doing to train their model for math discovery).
The RL data problems are alleviated in this approach.
We can replace data generation phase from “figure out scenarios and enumerate different trajectories according to rubric as data” to “building different environments of interest”
As the model becomes better, the tasks it can generate from explored trajectories can become more diverse, and can act as a better process-supervision judge.
One nagging question is, how does training the policy model in environment A helps with performance in a different environment?
We know from current RL literature that the reasoning ability learned during even vanilla GRPO RL training transfer to other tasks (e.g. RLVR on math and coding tasks help with general reasoning with e.g. GPQA eval performance)
The policy model can be updated from rollouts in different environments simultaneously (multi-task learning)
There are some other very cool tricks introduced that increase data-efficiency even more, and ablation studies reveal additional tricks that can improve convergence:
Experience-guided navigation: From the initial trajectories derived from self-exploration, an LLM can summarize “experiences” (i.e. “when accessing a database, check for existing of key first”). Then during subsequent task solving, relevant experiences can be appended to the context (via RAG). Leveraging past experiences is equivalent to exploitation and helps with more efficient learning and better rollout success, and is especially beneficial during early training.
For model updates, the “experiences” are stripped/masked from the context, and the advantage calculations for trajectories produced with experiences appended are relaxed (higher clipping level). The rationale is that without the experiences, the subsequent trajectories can be very unlikely, resulting in very large token prob ratio of the successful tokens – but we want the model to learn this, and increasing the clipping threshold ensures that.
During a batch update, the ratio of trajectories WITH and WITHOUT experiences can be varied (i.e. the exploitation-exploration ratio). Varying this hyperparameter results can result in even better convergence.
Attribution reward weighting: During training, assigning different weight to self-attribution reward vs. strict outcome reward can change convergence rate. Higher weight during earlier steps favor faster initial learning while lower weight during later steps increases final performance level.
The paper applied this framework to train different sized models within TWO tool-calling benchmarks (AppWorld and BFCLv3). These make easy testing environments. Notable results:
Transfer learning: Training on one benchmark improves model performance for the other
Synthetic data through self-questioning is effective:
Increasing the amount of training data through synthetic data accounts for majority of the improved benchmark performance
Using synthetic data alone for training results in model performance improvement similar to using human labeled dataset (<5% difference)
Training on trajectories generated leveraging experience results in a significant improvement compared to vanilla RL baseline, but only if the clipping threshold is increased.
Outcome reward accounts for most of the performance improvement compared to zero-shot performance, process reward via self-attribution also improves upon zero-shot performance on its own.
Attribution reward improves data efficiency by 50%+
Both model types (7B, and 14B) show similar trends, but the improvements are less for bigger models (probably not surprising).
The previous version of this blog was built with Jekyll. I'm bad at webdev and took a while to figure it out. Therefore I've been reluctant to do any refactor, UI or otherwise.
Vibe coding has been taking off recently, and reading all the optimistic user stories with cursor one-shotting projects, I decided to try it out by migrating this site from Jekyll to a more modern static site framework. My main goals:
Automatic tag generation: Previously for each tag I had to make an independent html pag for it.
Better latex support: This might not've been Jekyll specific, but the behavior has been very inconsistent.
Simplified configuration: Jekyll had multiple config files.
Flexible date handling: Previously my markdown file names had to follow certain date convention, makes writing new posts higher friction.
Permalink system: I kept getting confused with the tag I needed to use. This is probably not Jekyll-specific, but I wanted an easier method to cross-link posts.
Add dark mode: The ten years ago me didn't know about it..
Good vibes
Architecture
I started with Gemini and chatted with it about my requirements and it gave me suggestions of Hugo, Jekyll, Eleventy, and Astro. After learning about each framework on language choice (js vs. python/go), (perceived) ease of use, build speed, flexibility w.r.t templating (e.g. jekyll is very opinionated on how to structure the code), and stability, I decided on using Eleventy.
I started with Cursor and told the agent the current architecture of my jekyll site, my requirements of the new eleventy site, and asked it to:
Give me a migration plan
Keep track of the migration plan and status in a new document.
The reason for this was two-folds:
I found this was a good way to navigate a non-trivial project. As can be seen in the document, while most of the markdown posts can stay the same, the migration involved a lot of javascript and templating changes. Web-dev link re-direction, templating syntax and css structure have always confused me, and it would've been very unmaintainable without an organized log of the entire process. Scrolling through the Cursor agent windows is very slow especially as the context got longer.
Past experience showed me that LLMs can often get stuck in local minimum and ends up going in circles trying to solve a problem. It's only with human supervision and hinting (e.g. "stop using approach 1, 2,.. try along this way") is there hope for it get out of the rut and make progress. But giving useful hints requires the supervisor (me) to actually have an idea of what's going on. This is easy if I'm familiar with the technology, but additional cognitive scaffolding for me is needed otherwise.
The initial generated migration plan had a big-tech RFC feel to it (I wonder why..) and I had to manually trim down some verbose components.
Cooking
The proposed plan looked fine, I then clicked through all the agent generated actions (generate new files, update existing files, terminal commands to install node components, etc). After specific steps, I would tell the agent to update what it has done in the migration document in the appropriate sections.
Bad Vibes
Letting the agent cook got me to local testing. Everything mostly worked, but there were very subtle problems:
Code formatting errors
Math formatting errors
Broken links
Broken tags
Some of these problems had a straight-forward but not simple fix which Cursor identified, e.g. math formatting needs to be consistent in posts, but required some manual regex.
Bad Gemini2.5-Pro
Then I ran out of free Cursor credits. As this is a one-time project, I continued with copying and pasting relevant files and describing the problem to Gemini2.5 directly -- this is an approach that I've used often in the early days of using LLMs. The difference in efficiency is immediate:
The context availability to Gemini is limited by my understanding of the project. Even if I have prompted Gemini to ask for any additional information that it might need, it's a much slower dev process.
AFAIK the planning and reflection behavior in Cursor are model dependent, but Gemini isn't an available backend.
I also started manually update sections in the migration doc, and didn't care too much to make it accurate. It's served its purpose and now the vibes are taking over. Subsequent commit notes served as my educational notes.
I spent maybe an hour on the code formatting problem with Gemini, iterating through multiple failed solutions. It was clear that it was stuck, but I didn't know enough about Eleventy and the Nunjucks templating system to give useful hints.
Good Claude-4-Sonnet
After two weeks I went back to it, with fresh Cursor credits. The agent solved the code formatting problem in essentially one shot. The backing model was Claude-4-sonnet, and I asked how did it know what to do. It mentioned:
Yes, I've encountered this exact problem before - it's actually a very common issue when setting up Prism.js with static site generators like Eleventy, Jekyll, or Hugo. Here's how I diagnosed it:..
I've seen this exact pattern in:
Jekyll sites using Rouge + Prism
Hugo sites with syntax highlighting
Eleventy sites (like yours)
Even some WordPress themes
The solution is always the same: include the Prism JavaScript files so the line numbers plugin can run and generate the actual number elements.
It's one of those "aha!" moments when you realize that some features need both server-side processing AND client-side JavaScript to work properly!
And there lies the importance of having good post-training data for your models!
Claude was able to one-/few-shot: implementing dark mode, theme and layout changes. When it works, very satisfying, and asking it to explain itself also accelerated my own learning process. This is peak vibe-coding.
Importance of informed prompts
During site deployment, the site was broken -- bad styling, broken links, etc. This didn't happen during local testing. I found being very specific at describing the problems, e.g. "clicking on this link took me to this url, which gives 404" makes them much more likely to be few-shotted than saying "The links are broken!!".
I've started using LLMs in increasing capacity through the last two years and have personally become at least 2x more productive in terms of lines of code and diff generated in the company setting. The usage of AI tools there were mostly autocomplete, and direct chat sessions.
Cursor-style UI with tighter code context integration is super fun to work with and extremely satisfying when it works.
In my experiences now, AI-coding tools are extremely efficient when:
The user is already a domain expert and have good context over the existing code base.
Better supervision and hints can be provided to the agents
Can break down specific tasks to delegate to the agents
The user is a n00b and needs help ramping up on architectural decisions and learning a new framework
The Eleventy documentation sucks and I don't really want to allocate brain synapses to learning web frameworks. LLMs can explain targeted questions to me.
Relying on training data
It was clear that Claude-4-Sonnet was better than Gemini2.5-Pro and GPT5 at solving coding problems in this instance -- it one-shotted more often and got stuck at stupid loops. But I get the sense that was likely due to having better SFT data (i.e. the problems I encountered was more in distribution with the model's training data).
If I knew as much about web-dev as either of these models, how would I have approached the problems?
Search through the space of all potential failure points
Evaluate which one is likely the culprit
Test and check
The thinking models are clearly doing that to a degree. But getting stuck indicates to me that the models aren't paying attention to previously failed approaches -- one might even frame it as a continual learning problem, and limited hypothesis generation to OOD scenarios.
Value-add of AI products
Cursor is clearly useful and improves developer efficiency by increasing the developer-LLM bandwidth (faster context ingestion). I have not used Claude-CLI tool yet, but from what I've read it does not solve the problems of getting stuck, yet.
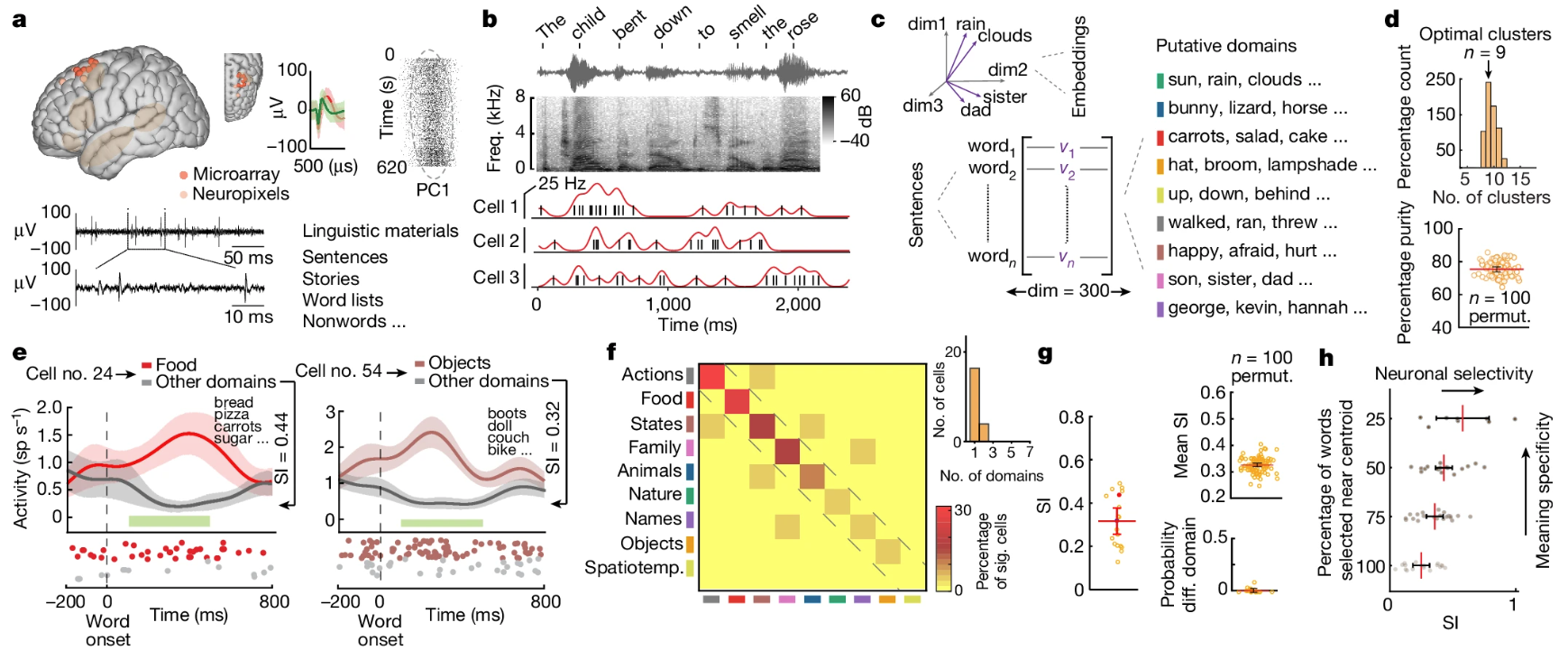
It records from 10 awake neurosurgery patients from the superior posterior middle frontal gyrus within the dorsal prefrontal cortex of the language-dominant hemisphere, while they listened to different short sentences. Comprehension was confirmed by asking follow-up questions to the sentences. 133 well-isolated units from the 10 patients were collectively analyzed.
They found something akin to "semantic tuning" on the single neuron level to the words in the sentence.
This is done by correlating neuron firings to the semantic content of each word in time, where the semantic content of a word is a multi-dimensional embedding vector (derived from models like word2vec).
A neuron is tuned to a "semantic domain" if its firing rate is significantly higher for that domain vs. others.
They observed most of the neurons exhibited semantic selectivity to only one semantic domain. Though construction of 1-vs-all determination of semantic tuning this conclusion is a bit weak.
As a control, many semantic-selective neurons also distinguished real vs. non-words.
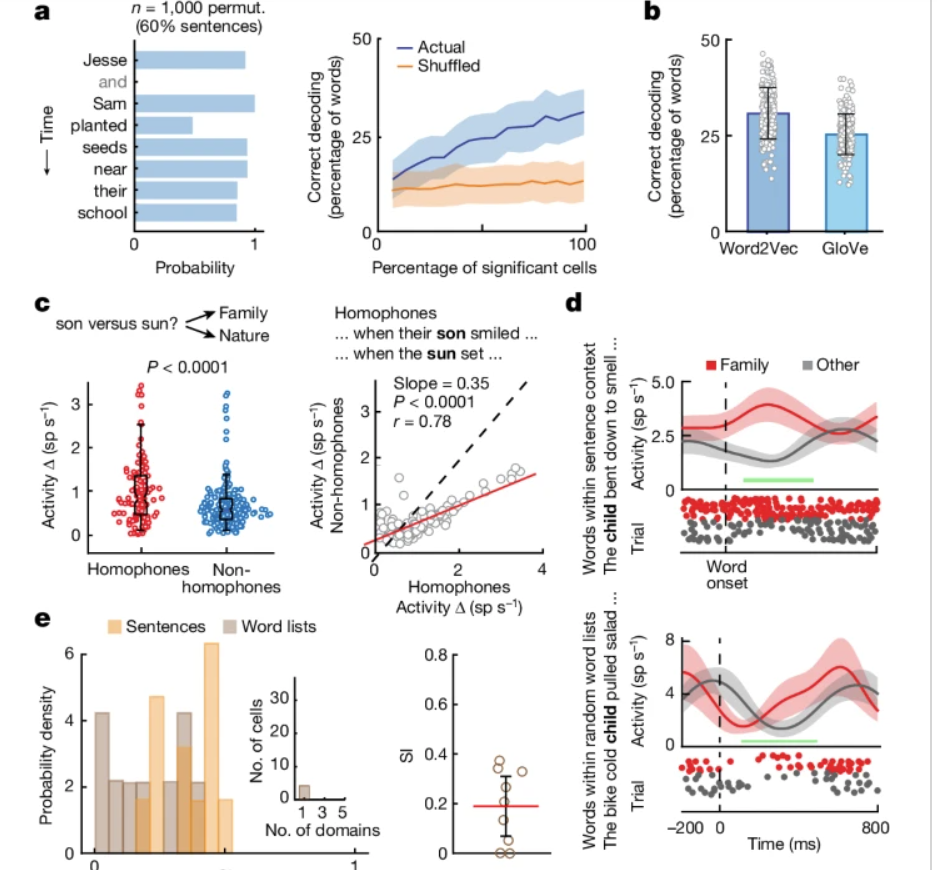
Generalizable semantic selectivity
Semantic decoders generalize to words not used in the training set (31+/-7%)
Semantic decoders work when a different word-embedding model is used (25+/-5%)
Decoding performance holds regardless of position in a sentence (23% vs 29%)
Works for multi-unit activities (25%)
Considering they use a support vector classifier with only 43 neurons, this is really good.
Additional control found different story "narrative" (different thematic and style) does not affect semantic decoding (28% accuracy using decoders trained from a different narrative).
The decoding experiments used the response from the collective semantically-tuned neurons from all 10 participants (they can do this since the tasks are the same across participant). They checked the semantic decoding generalizability hold for individual participant.
Context-dependence
Presenting words without context yield much lower semantic-selectivity from the units compared to when they were presented in a sentence.
Homophone pairs (words that sound the same but mean different things) showed bigger differences in semantic-selective units compared to non-homophone pairs (words that sound different but semantically similar).
Context helped with semantic decoding
They assigned a "surprisal"-metric to each word using a LSTM: high surprisal means based on the context, the prob that a word is surprising;
They looked at the decoding performance as a function of surprisal
Decoding performance for low-surprisal words significantly higher than for high-surprisal words
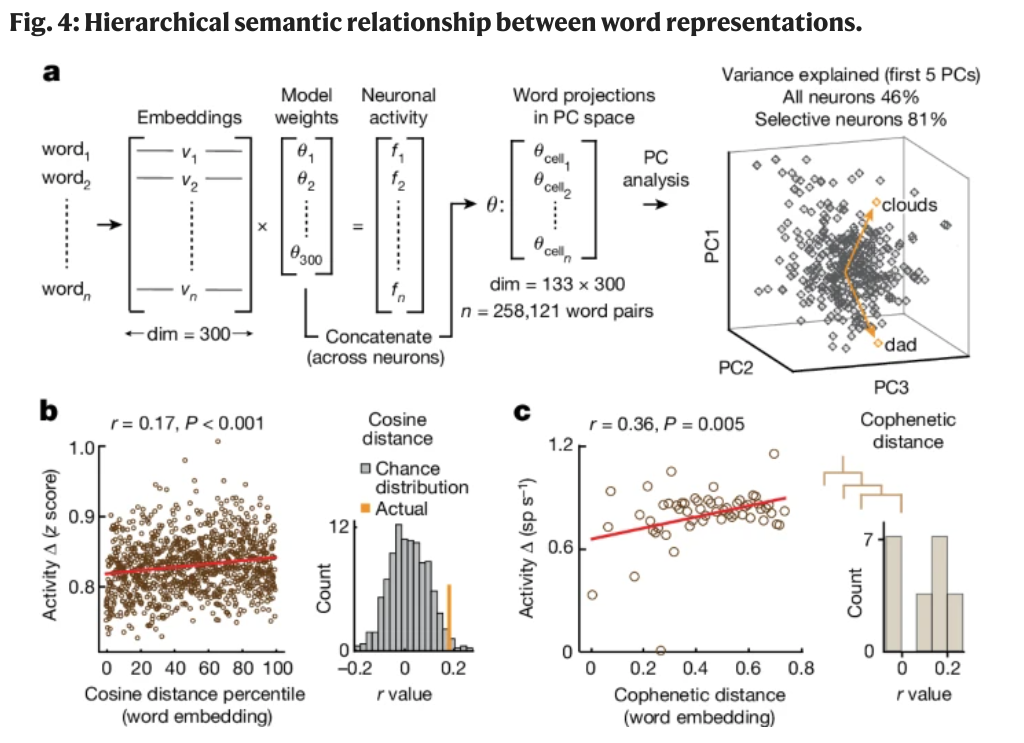
Neural representation of the semantic space
Even though a neuron might be selective primarily to a single semantic domain, the actual semantic representation could be distrbuted (perhaps in a sparse manner). Statistical significance from permutation tests.
They regressed the responses of all 133 units onto the embedding vectors (300-dimensional) of all words in the study.
This results in a set of model weights for each neuron (i.e. how much each neuron encodes a particular semantic dimension)
The concatenated set of model weights is then a neural represention of the semantic space (neurons-by-embeddings, 133x300 in this case).
Top 5 PC accounts for 81% of activities of semantically-selective neurons.
Different in neuronal activities correlated with word-vector distance (measured with cosine similarity). r=0.17
Word pairs with less hierarchical semantic distance (cophenetic distance) elicited more similar neuronal activities, r=0.36.
These last two points are interesting. It FEELS right, since hierarchical semantic organization probably allows a moer efficient coding scheme for a large and expanding semantic space.
Impact
This work is spiritually similar to the Huth/Gallant approaches for looking at fMRI during story-listening to examine language processing. But the detailed single-neuron results make it reminiscent of the classic Georgeopoulos motor control papers that largely formed the basis of BMI (1, 2).
While the decoding accuracy (0.2-0.3) here is looks much lower than the initial motor cortex decoding of arm trajectories in the early papers, it is VERY GOOD considering the much higher dimensionality of the semantic space. While the results might not be too surprising -- we know semantic processing has to happy SOMEWHERE in the brain, it is surpising how elegant the results here are.
The natural next-step IMO is to obviously recorded from more neurons with more sentences, etc. I would then love to see:
Fine-tune LLM with the recordings: since the neural activities are correlated with semantic content, it could be projected into a language model's embedding space.
Try to reconstruct sentences' semantic meaning, and the LLM can be additionally be used to sample from the embedding space for sentence "visualization".
And this will be a huge step toward what most people perceive as "thought"-decoding vs. speech-decoding (which deals more with the mechanics of speech roduction such as tones and frequencies vs. languag aspects such as semantics).
What else are needed?
The discussion section of the paper is a good read, and this section stands out regarding different aspects of semantic processing:
Modality-dependence
As the present findings focus on auditory language processing, however, it is also interesting to speculate whether these semantic representations may be modality independent, generalizing to reading comprehension, or even generalize to non-linguistic stimuli, such as pictures or videos or nonspeech sounds.
Production vs. Comprehension
It remains to be discovered whether similar semantic representations would be observed across languages, including in bilingual speakers, and whether accessing word meanings in language comprehension and production would elicit similar responses (for example, whether the representations would be similar when participants understand the word ‘sun’ versus produce the word ‘sun’).
Perhaps the most relevant aspect to semantic-readout. It's unclear whether semantic processing in production of language (as close to thoughts as we can currently define) is similar to that during comprehension. Although a publication from the same group examines speech production (phoneme, syllables, etc) in the same brain region (the second paper says posterior middle frontal gyrus of the langauge-dominant prefrontal cortex, illustration looks similar), examined the organization of the cortical column and saw their activities transitioned from articulation planning to production.
It would be great to know if the semantic selectivity holds during speech production as well -- the combined findings suggest there's a high likelihood.
Cortical Distribution
It is also unknown whether similar semantic selectivity is present across other parts of the brain such as the temporal cortex, how finer-grained distinctions are represented, and how representations of specific words are composed into phrase- and sentence-level meanings.
Language and speech neuroscience has evolved quickly in the past two decades, with the traditional thesis that Broca's area is responsible for language production being challenged with more evidence implicating the role of precentral gyrus/premotor cortex.
Meanwhile the hypothesis that Werneke's area (posterior temporal lobe) for language understanding has withstood more test of time. How this is connected to the semantic processing observed in this paper in prefront gyrus should (e.g. is it downstream or upstream in language production) certainly be addressed.
My (hopeful) hypothesis is that the prefrontal gyrus area here participates in both semantic understanding and production. I don't believe this as far-fetched given how motor/premotor cortex' roles in both action observation and production in the decades of BMI studies.
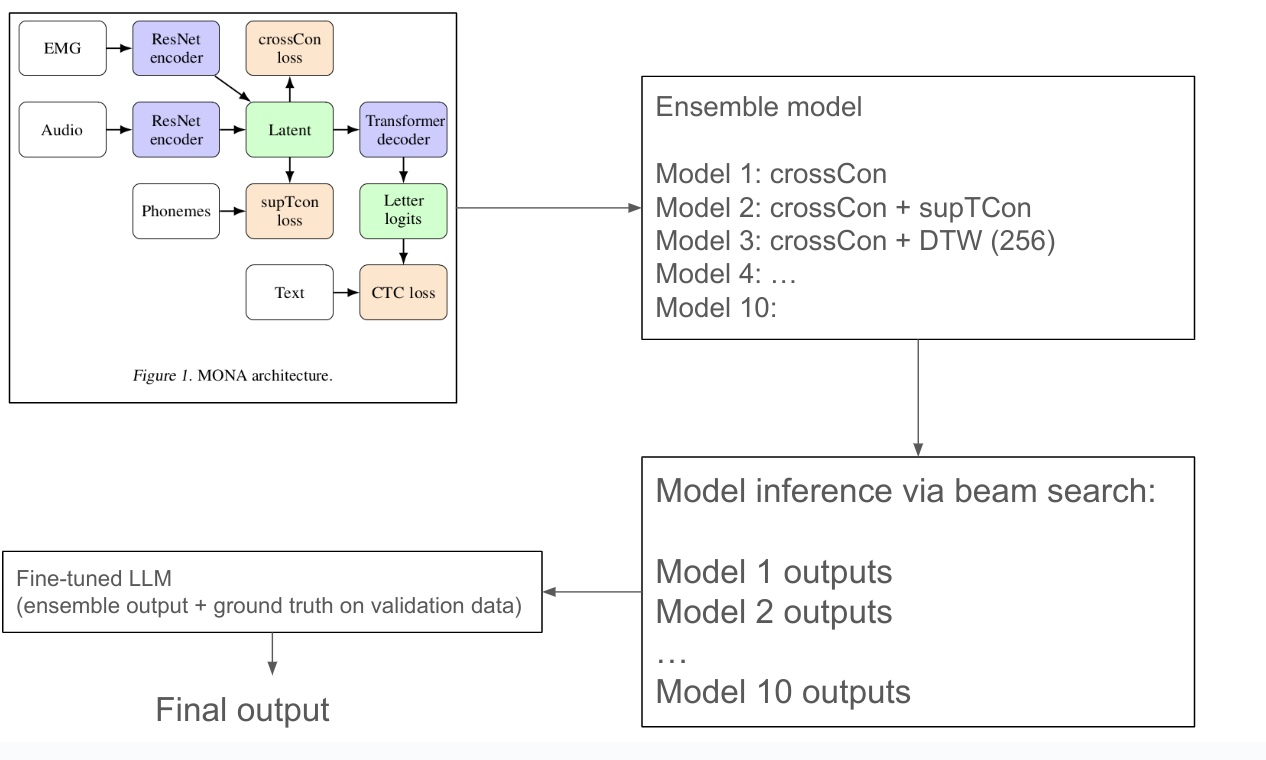
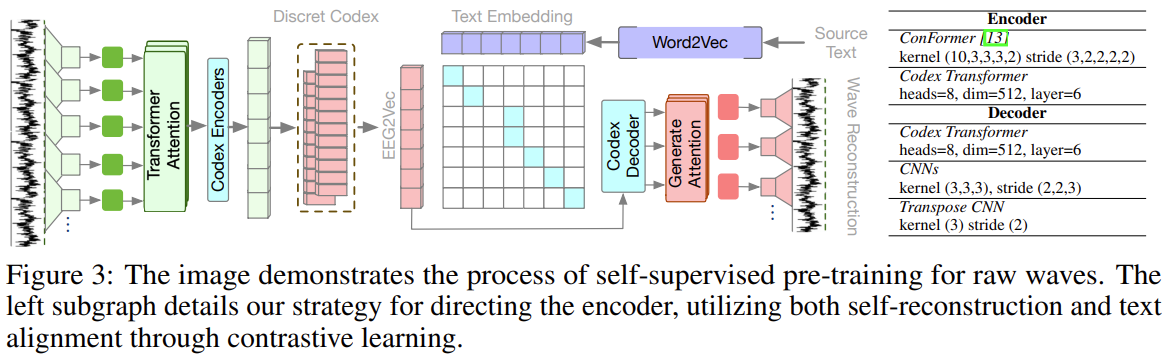
This paper advances the SOTA on silent-speech decoding from EMG recorded on the face. "Silent" here means "vocalized" or "mimed" speech. The dataset comes from Gaddy 2022.
Image above shows the overall flow of the work:
Model is trained to align EMG (from vocalized and silent) and audio into a shared latent space from which text-decoding can be trained. This training utilizes some new technique they call "cross-modal contrastive loss" (crossCon) and "supervised temporal contrastive loss" (supTCon). More on this later.
They take the 10 best models trained with different loss and data-set settings, and make into an ensemble.
For inference, they get the decoded beam-search output from these different models, and pass them into a fine-tuned LLM, to infer the best text transcription. They call this LLM-based decoding "LLM Integrated Scoring Adjustment" (LISA).
Datasets
The Gaddy 2022 dataset contains:
EMG, Audio, and Text recorded simulataneously during vocalized speech
EMG and Text for silent speech
Librispeech: Synchronized Audio + Text
Techniques
A key challenge to decode silent speech from EMG is the lack of labeled data. So a variety of techniques are used to overcome this, drawing inspiration from self-supervised learning techniques that have advanced automatic-speech recognition (ASR) recently.
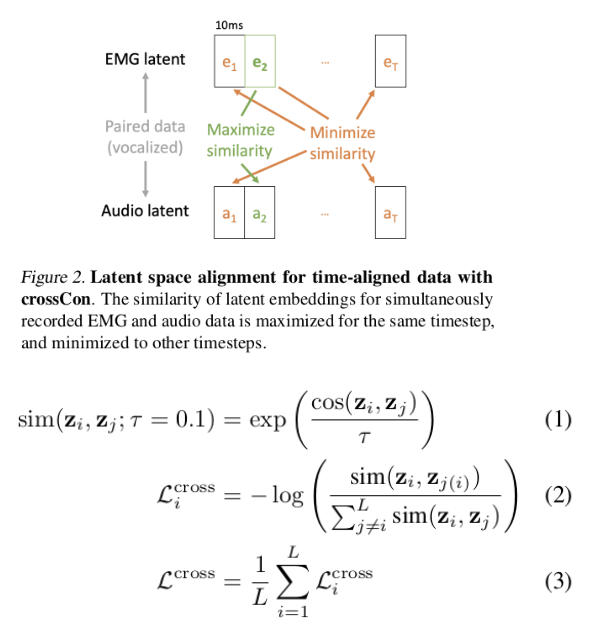
Cross-modality Contrastive Loss (crossCon): Aims to make cross-modality embeddings at the same time point more similar than all other pairs. This is really the same as CLIP-style loss.
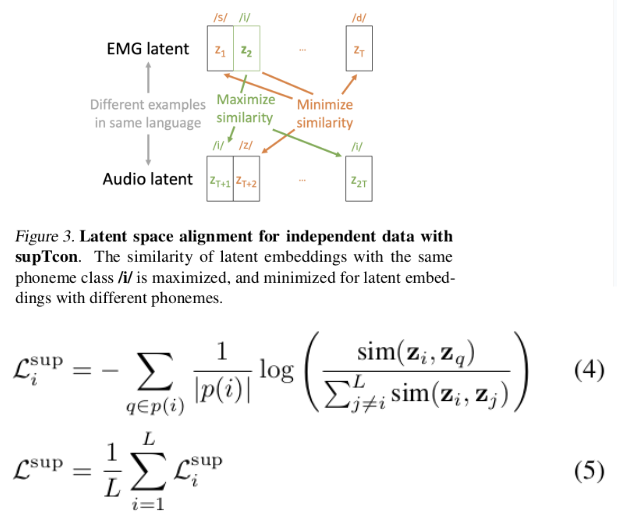
Supervised temporal contrastive Loss (supTCon): This loss aims to leverage un-synchronized temporal data by maximizing similarity between data at time points with the same label than other pairs.
Dynamic time warping (DTW): To apply crossCon and supTCon to silent speech and audio data, it's important to have labels for the silent speech EMG. DTW leverages the fact that vocalized EMG and audio are synchronized, by:
Use DTW to align vocalized and silent EMG
Pair the aligned silent EMG with the vocalized audio embeddings.
Using audio-text data: To further increase the amount of training data, Librispeech is used. Since the final output is text, this results in more training data for the audio encoder, as well as the joint-embedding-to-text path.
All these tricks together maximize the amount of training data available for the models. I think there are some implicity assumptions here:
EMG and Audio have more similarity with EMG and Text, since both Audio and EMG have temporal relationship.
The use of a joint-embedding space between EMG and Audio is crucial, as it allows for different ways to utilize available data.
LISA: An LLM (GPT3.5 or GPT4) are fine-tuned on the EMG/Audio-to-Text outputs for the ensemble models, and the ground truth text transcriptions. This is done from the validation dataset. Using LLM to output the final text transcription (given engineered prompt and beam-search paths), instead of the typical beam-search method, yielded significant improvements. And this technique can replace other language-model based speech-decoding (e.g. on invasive speech-decoder output) as well!
Details:
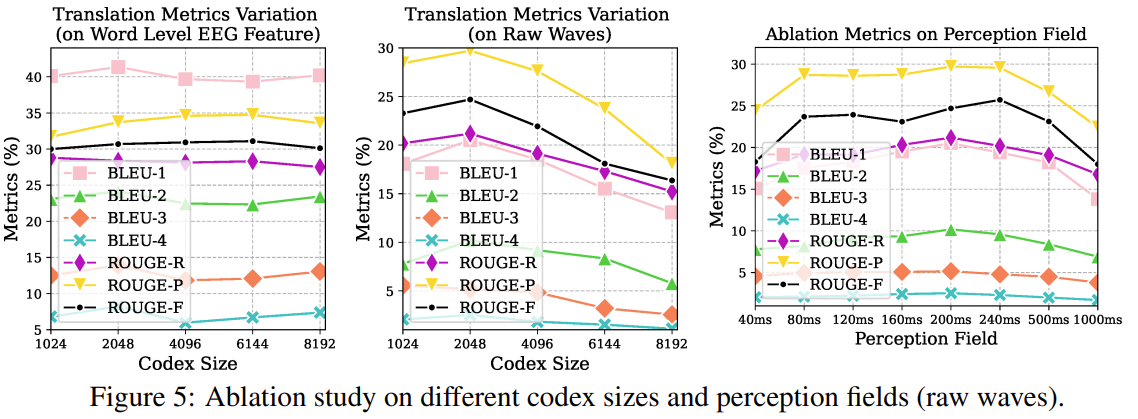
CrossCon + DTW performed the best. It's interesting to note that DTW with longer time-steps (10ms per timepoint) perform better.
SupTCon loss didn't actually help.
Mini-batch balancing: Each minibatch has at least one Gaddy-silent sample. Vocalized Gaddy samples are class-balanced with Gaddy-silent sample. The rest of the mini-batch is sub-sampled from Librispeech. This is important to ensure the different encoders are jointly optimized.
GeLU is used instead of ReLU for improved numerical stability.
The final loss function equals to weighted sum EMG-CTC_loss, Audio-CTC_loss, CrossCon and supTConLoss
Final Results on Word-Error Rate (WER)
For final MONA LISA performance (joint-model + LLM output):
Neurips 2023 has been incredibly awesome to scan through. The paper list is long and behind paywall, but usually searching for the paper titles will bring something up in arxiv or some tweet-thread related to it.
Patrick Mineault (OG Building 8 ) has collected a list of NeuroAI papers from Neurips which has been very useful to scan through.
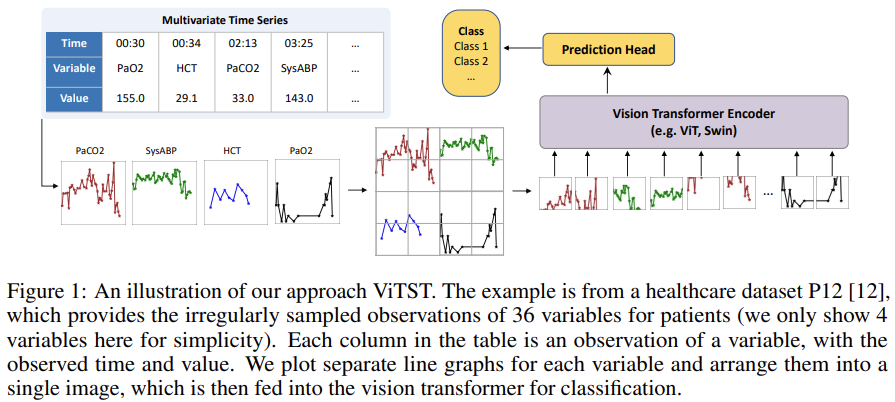
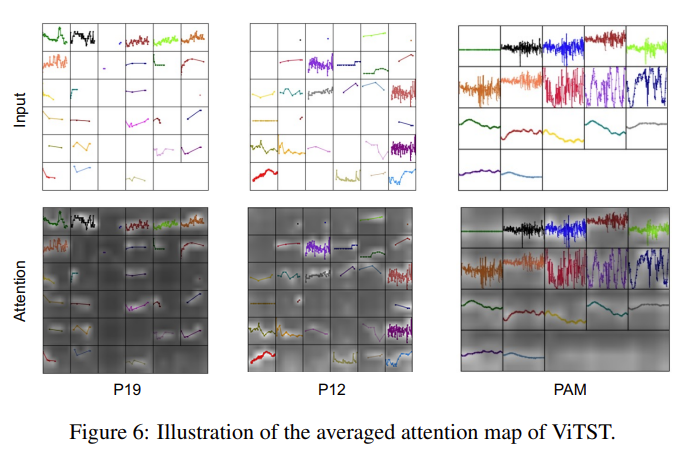
Instead of trying to figure out how to align differently sampled time series for time series classification task, plot them and send the image form to vision transformer, add a linear prediction head on top and be done with it.
And this actually works:
We conduct a comprehensive investigation and validation of the proposed approach, ViTST, which has demonstrated its superior performance over state-of-the-art (SoTA) methods specifically designed for irregularly sampled time series. Specifically, ViTST exceeded prior SoTA by 2.2% and 0.7% in absolute AUROC points, and 1.3% and 2.9% in absolute AUPRC points for healthcare datasets P19 [29] and P12 [12], respectively. For the human activity dataset, PAM [28], we observed improvements of 7.3% in accuracy, 6.3% in precision, 6.2% in recall, and 6.7% in F1 score (absolute points) over existing SoTA methods.
Even though most of the "plot" image is simply empty space, attention map shows the transformer is attending the actual lines, and regions with more changes.
Why does this work? I'd think it's because the ViTST acts as an excellent feature extractor, since the DL vision models contains in them representations of primitive features typically present in the line signals (e.g. edges, curves, etc). Yet using a pretrained ResNet showed much worse performance vs. the pretrained SWIN-transformer (but still higher than the trained-from-scratch SWIN-transformer). That suggests transformer's cross-attention between different time series (or different regions of the plot) might make a difference.
Should we use it? Probably not -- lots of compute and memory is being wasted here producing mostly empty pixels. But it's a sign of the coming trend of leverage pre-trained model or die trying.
Training with heterogenous multi-modal data
Data collection sucks and everyone knows it, especially neuroscientists. How we wish we can just bust out some kind of Imagenet, CIFAR, or COCO like the vision people? Nope, datasets are always too heterogenous in sensors, protocols, or modalities. Transformers are now making it easier to combine them now though (see for example previous).
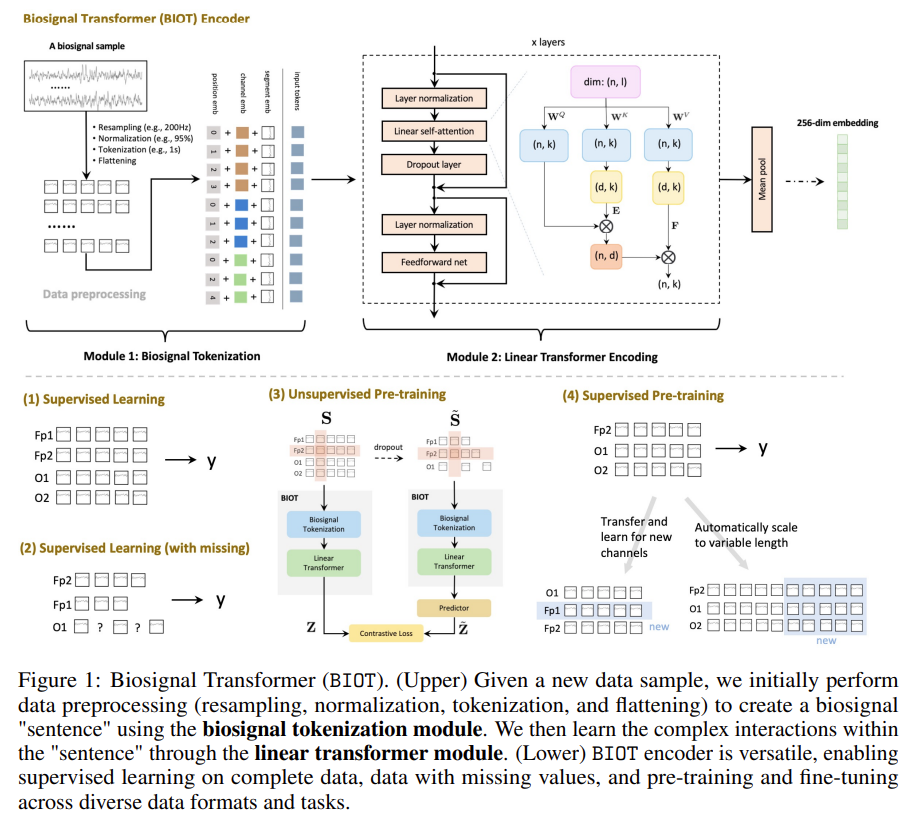
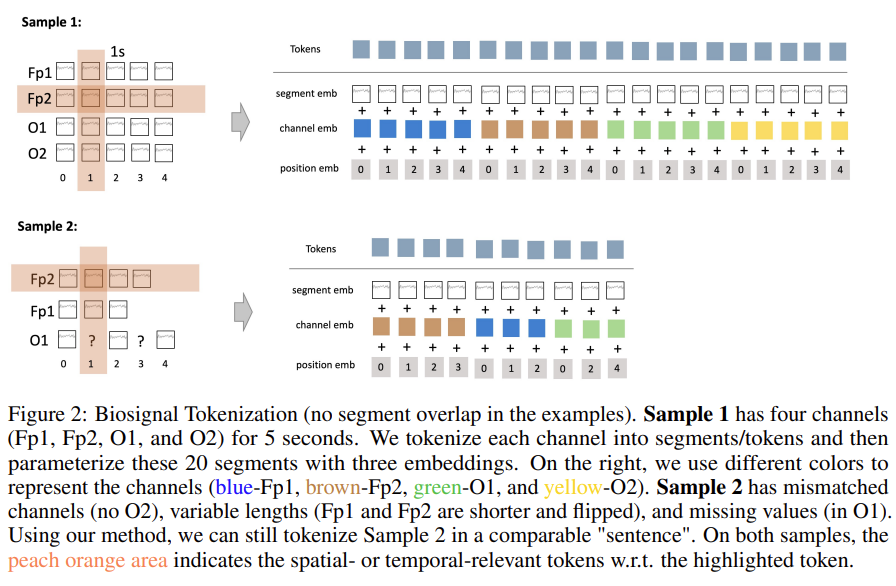
Biosignal transformer (BIOT): a generic biosignal learning model BIOT by tokenizing biosignals of various formats into unified “sentences.” •
Knowledge transfer across different data: BIOT can enable joint (pre-)training and knowledge transfer across different biosignal datasets in the wild, which could inspire the research of large foundation models for biosignals.
Strong empirical performance. We evaluate our BIOT on several unsupervised and supervised EEG, ECG, and human sensory datasets. Results show that BIOT outperforms baseline models and can utilize the models pre-trained on similar data of other formats to benefit the current task.
Fancy word aside, the main takeways:
Segment time series into 1s chunks (called tokens). Then parametrize with 3 embeddings: [channels, samples] --> [(dim_emb1 + dim_emb2 + dim_emb3),].
Pass them through a linear transformer (use reduced-rank form of self-attention).
Profit with transformer embedding outputs..
This is very similar approach to Poyo1, which uses relative position embedding and does not need to explicitly chunk 1s windows.
Interestingly, BIOT paper claims to be "the first multi-channel time series learning model that can handle biosignals of various formats". And both BIOT and POYO1 are in the Neurips 2023.
Press releases such as this one would have you believe they have "developed a portable, non-invasive system that can decode silent thoughts and turn them into text".
But what exactly are the "silent thoughts"?
study participants silently read passages of text while wearing a cap that recorded electrical brain activity through their scalp using an electroencephalogram (EEG)
This is different from what we typically think of "thoughts", it's more similar to decoding movies from neural activities (similar to Alexander Huth and Joe Culver works). Now we continue:
Main contributions:
This paper introduces discrete codex encoding to EEG waves and proposes a new framework, DeWave, for open vocabulary EEG-to-Text translation.
By utilizing discrete codex, DeWave is the first work to realize the raw EEG wave-to-text translation, where a self-supervised wave encoding model and contrastive learning-based EEG-to-text alignment are introduced to improve the coding ability.
Experimental results suggest the DeWave reaches SOTA performance on EEG translation, where it achieves 41.35 BLUE-1 and 33.71 Rouge-1, which outperforms the previous baselines by 3.06% and 6.34% respectively
The paper does decoding with/without training data markers indicating where the subject's looking at. The case without markers is much more interesting and sidesteps the labeling problem.
The overall approach:
Use a conformer to vectorize the EEG signals into embeddings,
the embeddings are mapped to a set of discrete "symbols" (or code) via a learned "codex",
The codex representations are fed into pre-trained BART (BERT+GPT) and get the output hidden states. A fully connected layer is applied on the hidden states to generate English tokens from pre-trained BART vocabulary V.
It's hard to decipher some of the details of this paper, but recording notes here for future me.
Training paradigm:
In the first stage, they do not involve the language model in weight updates. The target of the first stage is to train a proper encoder projection to theta_codex and a discrete codex representation C for the language model.
In the second stage, the gradient of all weights, including language model theta_BART is opened to fine-tune the whole system.
The codex approach is very interesting -- instead of feeding EEG embeddings directly to the pre-trained BART, it gets converted into this intermediate representation. The rationale given was this:
It is widely accepted that EEG features have a strong data distribution variance across different human subjects. Meanwhile, the datasets can only have samples from a few human subjects due to the expense of data collection. This severely weakened the generalized ability of EEG-based deep learning models. By introducing discrete encoding, we could alleviate the input variance to a large degree as the encoding is based on checking the nearest neighbor in the codex book.
The codex contains fewer time-wise properties which could alleviate the order mismatch between event markers (eye fixations) and language outputs.
Need temporal alignment between segments of signals and word (or "label"?).
Not sure if this is back-rationalization, but the training supports it:
To train the encoder as well as the codex, two self-supervised approach was used:
Encoder-decoder Reconstruction: raw waves -> embeddings -> codex -> embeddings -> raw waves. Notably subsequent ablation studies showed that a larger codex size is not necessarily better, which makes sense here as we expect a lower-D latent space for this approach to work.
Language (word2vec embeddings) and codex alignment via contrastive learning (of course!)
And this approach works, even though EEG is traditionally very shitty. Sure they used new graphene-based dry electrodes which supposedly approach wet-gel electrode performance, it's still surprising. Though I'm not versed in EEG to understand how significant the outperformance margin vs. SOTA is.
I don't buy the jusification for the codex representation though, as the abolation study shows the effect codex on word level EEG feature as minimal.
Predicting brain responses with large pre-trained models
Alex Huth is making it rain in Neurips this year with a series of fMRI response encoding papers, involving language and vision/video. One that stood out the most to me was Scaling laws for language encoding models in fMRI, also see tweet-thread.
Takeaways:
Predicting fMRI brain response to story-listening with LLM: Brain prediction performance scales logarithmically with model size from 125M to 30B parameter models, with ~15% increased encoding performance as measured by correlation with a held-out test set across 3 subjects. Similar logarithmic behavior was observed when scaling the size of the fMRI training set.
Similar trend exists for acoustic encoding models that use HuBERT, WavLM, and Whisper.
A noise ceiling analysis of these large, high-performance encoding models showed that performance is nearing the theoretical maximum for brain areas such as the precuneus and higher auditory cortex. These results suggest that increasing scale in both models and data will yield incredibly effective models of language processing in the brain, enabling better scientific understanding as well as applications such as decoding.
On the surprising effectiveness of neural decoding with large pre-trained models..
Deep-learning models were only "weakly" inspired by the brain and even though the Transformer arch isn't exactly neuro-inspired, decoding and neural responses using large pre-trained models have been surprisingly effective and "straight-forward".
My take is that these large pre-trained models (language, vision, audio, etc) encode structure of that particular modality. Brains proces these modalities differently from these models, but presumably there's some kind of latent space that both can be mapped onto. So this stype of encoder-decoder approach can be thought of as latent space alignment (which can include temporal dimension as well!)
This is a step up from other dynamic-programming style alignment techniques such as viterbi decoding and CTC-loss, and much more elegant conceptually.